Welcome to Xplore Automation
Featured
Best Smart Bulbs Or Smart Switches in 2024

Best Smart Bulbs Or Smart Switches in 2024
When deciding between smart bulbs or smart switches, it’s essential to consider your specific lighting …

Turn on Living Room Light – Illuminate Your Space with Ease
Basically, “turn on living room light” refers to simply pressing the light switch or using …

Blink Whole Home Security Camera Bundle – Enhance Your Home’s Safety Today
Blink Whole Home Security Camera Bundle is a comprehensive solution for total home security. It …

Lorex Security Camera Installation – Simplify Your Home Security
For Lorex security camera installation, follow the included instructions carefully. Securely mount and connect the …
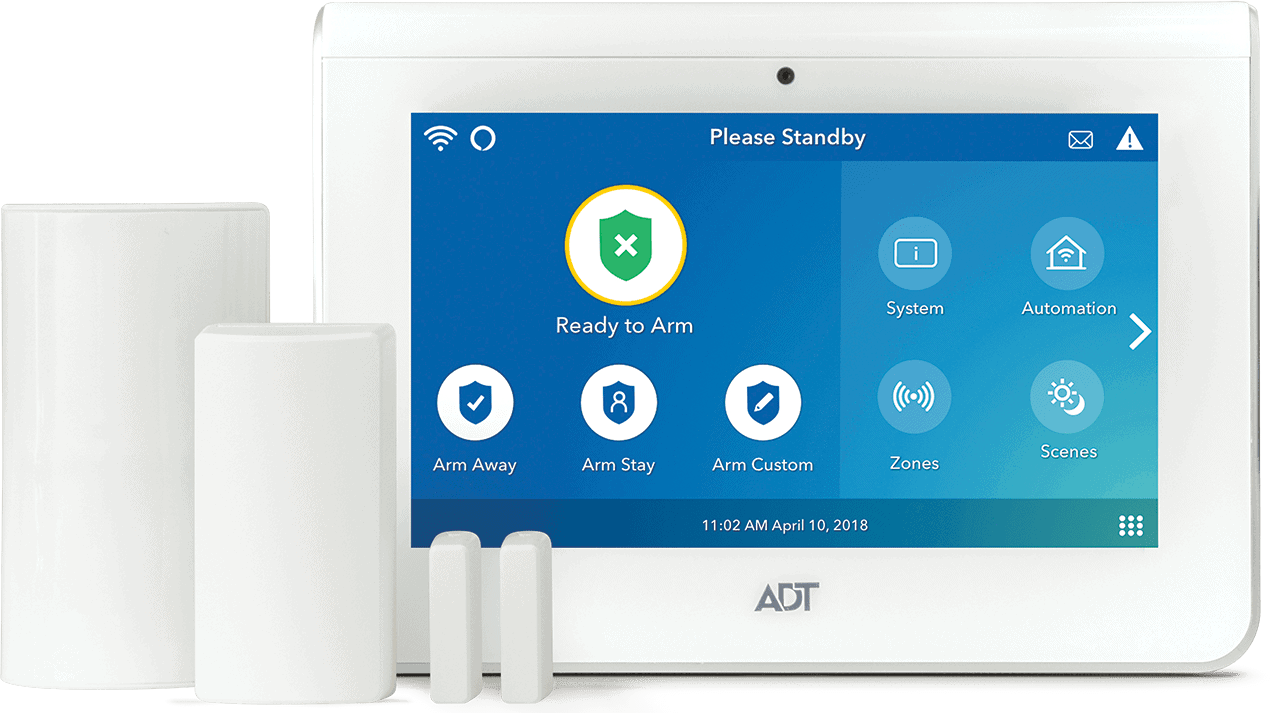
ADT Alarm System Business – The Powerhouse Solution for Your Smart Home Security
ADT Alarm System Business offers top alarm systems for your businesses including your home security …

Blink Doorbell Camera Live View – Enhance Your Security with Real-Time Monitoring
Get instant access to Blink doorbell camera live view for real-time monitoring and security. Remain …
Zigbee 2 Mqtt Home Assistant – The Ultimate Guide to Seamless Home Automation
Zigbee2MQTT is a popular open-source software that allows you to integrate Zigbee devices with Home …

Home Assistant Vs Hubitat – The Ultimate Showdown
When choosing between Home Assistant and Hubitat, consider your specific smart home needs and the …

Home Assistant Ring Alarm: Secure Your Home with the Ultimate Protection
Home Assistant Ring Alarm Integration allows you to control and monitor your Ring Alarm system …
How Long for Ecobee to Calibrate – Discover the Quick Calibration Process
Ecobee takes about 7-10 days to calibrate its temperature settings. During this time, it learns …

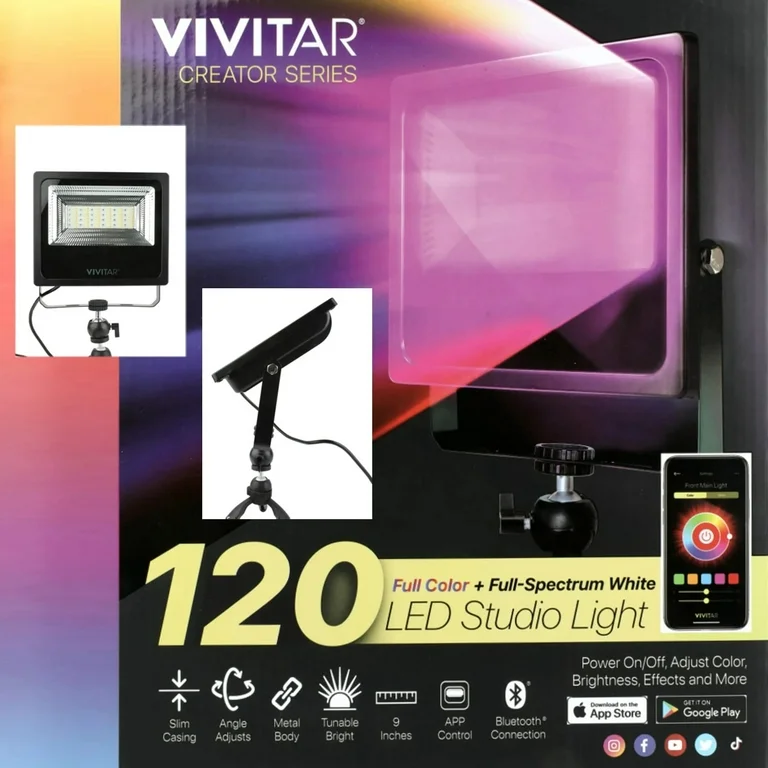
Home Lighting Automation Systems – Illuminate Your Space with Smart Efficiency
Home lighting automation systems use smart technology to control and manage lighting in your home. …

Home Automation New Construction – Effortless Control at Your Fingertips
Home Automation New Construction refers to new construction for home automation which provides smart control …

Home Automation Systems in India – Revolutionizing Living Spaces
Home automation systems in India offer convenience and control over household devices, allowing users to …

Home Automation Systems Diy – Transform Your Home with These DIY Power Tips
Home automation systems DIY are a cost-effective way to add smart technologies to your home. …
Best Automated Home Lighting System – Illuminate Your Space with Effortless Ease
The best automated home lighting system is the Philips Hue Smart Lighting system. It offers …